









I wrote today’s article less than a year ago, so it’s not really “retro” yet, but somehow it’s time to bring it back up in this section on Saturday. I receive so many letters and enquiries on the subject that I think this article simply deserves to be here, and it certainly takes some of the pressure off me because I don’t always have to copy the link and send it out. And yes, in the meantime I have also dealt with noisy capacitors in conjunction with the coils, but this is not as serious (as often assumed). That will certainly be a new topic. In due course.
Original article from 2022
There are always many inconsistencies and ignorance around the voltage converters of a graphics card and the associated components, as well as the consequences in practical use. Annoying “coil beeping” is only one facet, which is not necessarily due to inferior quality of the coils, but often also to the basic topology of the circuit and the operating parameters. In addition, today we want to (and must) also clear up a legend about the real number of phases and how this differs from the existing number of control loops. Because even here, an unfavorable topology can lead to annoying noises, against the emergence of which the best coil is almost powerless. This is where the dear Mr. Lorentz and the force named after him come into play, but I’ll get to that in a moment.

But I have to say one thing first: The subject is highly complex and not easy for an outsider to get to grips with. I have therefore tried to break most of it down to a generally understandable level and also to leave out some further details, the engineers among you may please forgive me. And yet, not all of the content is easy to understand, so please take some time. Even if one or the other paragraph may sound complicated, you can skip things in between.
The DC/DC converter, the topology, coils and capacitors
Let’s start with the definition of terms, which is not entirely unimportant and serves the better understanding of the further explanations. Since DC voltage cannot be efficiently transformed directly (linear regulators generate far too high losses), DC/DC converters operate in principle like electronic switched-mode power supplies, but without a transformer and therefore not isolated. The DC/DC converters used on graphics cards use pulse width modulation (PWM) and convert the applied 12 V supply voltage into lower voltages, usually between 0.7 to 1.2 volts, depending on the load behavior and clock frequency of the GPU.
The term topology refers to various types of switching operations and combinations of energy storage elements, but we are only interested in transformerless, non-isolated converters that use a common current path between input and output. Today, we are only interested in the so-called buck or down converter. But don’t worry, it won’t be that difficult with the theory now. Important for us: In contrast to the already briefly mentioned linear regulators, which convert the power dissipation completely into heat in order to limit the output voltage, DC/DC switching regulators use the energy storage properties of inductive and capacitive components to transfer a power in individual “portions”. In a graphics card, these energy portions are mainly stored in the magnetic field of an inductor, i.e. the coils we know so well. So now we know what this pieces in the voltage regulator are actually used for.
The mode of action of the buck converter
Incidentally, the switching regulator ensures that only the energy required for the load currently demanded by the GPU is transferred into each packet, which is why this topology is very efficient. The following drawing of a so-called buck converter shows the highly simplified structure of a switching regulator, where the switch symbolically stands for the MOSFET bridge, which is controlled by the so-called PWM controller, which generates at least one phase (as shown here in the picture). The losses are significantly lower than with a linear regulator and the efficiency of the entire circuit can range from about 85% to over 95%, depending on the driven effort in circuit and components.
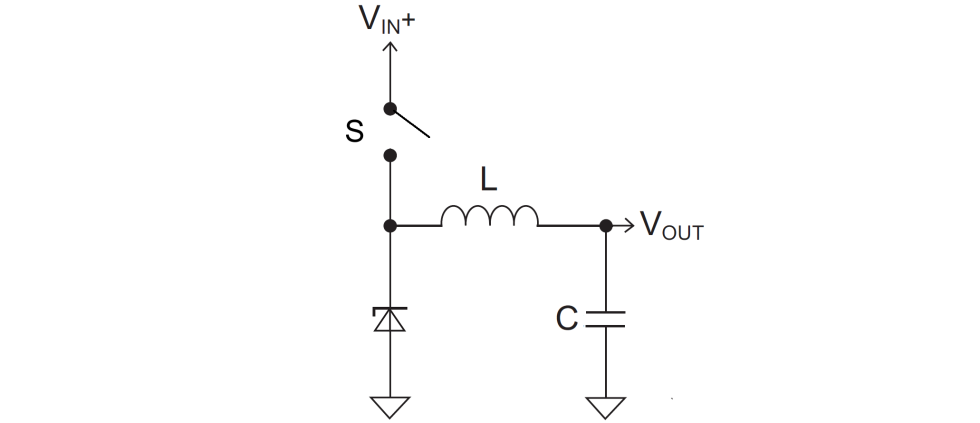
Now let’s consider the switch in the form of the PWM-controlled switching regulator. Through it, current flows via a momentarily closed switch into an inductive circuit (our dearly beloved coils), which leads to the output current. When the desired voltage value is reached (depending on the GPU’s clock and load), the switch opens at the beginning of the circuit and thus does not consume much more current than it really needs at the end. If the current stored in the coil (inductor) now falls below a certain level, the switch automatically closes again and the circuit starts anew. This is first the theory, where the capacitor C is used for smoothing. Also, you’ll read all of this again completely simplified on the next pages when it comes to coil whining.
In order to transfer this desired energy from the input to the output in controlled quantities, a very complicated control process is required. The type of control used on the graphics board is PWM (Pulse Width Modulation), where the amount of energy to be transferred from the input (Ue) to the output (Ua) is modulated by a pulse of variable width at a fixed time interval. The relative duty cycle of the PWM is the ratio of the period (in which energy flows from the source) to the period T (as the inverse of the switching frequency). We won’t be interested in that here for now, but we’ll come back to it in a moment when it comes to using multiple phases.
What is a high-side and a low-side?
The usual MOSFETs (i.e. our VRM) are usually overdriven when used as switching transistors, whereby the drain-source resistance is always at the minimum and thus the power losses in the switch remain low. As long as the gate voltage is significantly greater than the threshold voltage, the MOSFET is in saturation over the entire load range. We can see on the schematic below that there are even two MOSFETs, one switching to ground (low voltage side, Low Side) and the other switching to VIN+ (high voltage side, High Side). The exact operation of these two MOSFETs will be explained in a simplified way on the next pages, at this point we only take note of the structure.

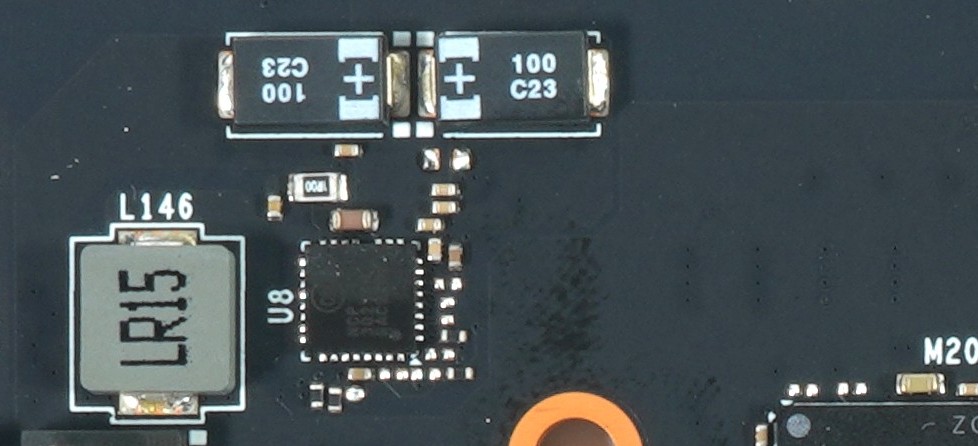
What is important for efficiency, however, are the variations in the structure and components. You can build the high-side, low-side and gate driver discretely and thus need at least three components. Often, a second MOSFET is added in parallel for the low side in order to better divide the high currents and thus reduce the internal resistance. A classic example of such a low-cost solution can be seen in the following picture, and I can already reveal it: here the coils are chirping like crazed cicadas on ecstasy.

If all these components are packed into a common package, then a single IC is created as a so-called DrMOS (Driver + MOSFET). If further control features and intelligent monitoring such as TMON (temperature) and IMON (current, MOSFET-DCR) are added, even highly complex Smart Power Stages (SPS) are created, with which extremely efficient circuits can be built. However, the advantage lies not only in the very high efficiency, but also in the significantly lower space requirement of such a component. If you only use discrete components and no PLC, you have to resort to the so-called Inductor-DCR for current monitoring, i.e. a much less accurate current measurement via the inductive resistance of the respective filter coils in the output area.

The switching frequency of the voltage regulator and the size of the coils
The size of the switching and storage elements of the switching controller are always inversely proportional to the switching frequency used. Conversely, this also means that the amount of energy stored in a coil is proportional to the frequency. And this in turn means that for a constant amount of energy, one could simply halve the inductance L by simply doubling the frequency. Unfortunately, this cannot be increased endlessly, otherwise there will be high-frequency wave salad. Therefore, an EMC compromise exists that limits the highest switching frequency that can still be used sensibly to approx. 500 kHz.
In the case of our graphics cards, the switching frequencies are usually between 350 and 450 kHz. Each board partner has his own preferences, but must also take into account which components are present, which currents could flow and how the distribution and number of phases looks. This is because this issue is highly important and also determines the efficiency of the voltage transformers and the possible occurrence of coil buzzing or beeping. Yes, it’s been a bit much theory so far, which I’ve tried to simplify as much as possible, it’s just that you really need to know these things. Without this knowledge, coils are exchanged wildly and almost always only on suspicion, and in the worst case, the graphics card is even destroyed, despite the supposedly better quality of the components.
The fact is, however, that these measurements can also have a certain influence on the coil noise and in the worst case it then almost doesn’t matter which quality class the coils used come from. An inexpensive card with a power supply that’s on the edge will therefore almost always be very audible, because savings had to be made somewhere. However, the entire block of all voltage transformers must then be regarded as an acoustically failed work of art.


















91 Antworten
Kommentar
Lade neue Kommentare
Urgestein
Veteran
1
Urgestein
Veteran
Veteran
Urgestein
Veteran
Veteran
Veteran
Urgestein
Urgestein
Veteran
1
Veteran
1
Urgestein
Mitglied
1
Alle Kommentare lesen unter igor´sLAB Community →